
Овощари и лозари вече широко прилагат електронни и пневматични ножици. Идват и специализирани машини, както и роботизирана „режеща ръка“
Основният начин за рязане, който и сега още е господстващ у нас, е ръчното (с градинарски ножици) отстраняване на ненужното от короните на овошките и от лозовите масиви. Модерните времена искат друго мислене.
Искат друго качество, продуктивност и ниска себестойност от агротехническите операции. Разбира се, и инвестиции. Както и точна оценка на бизнес риска поради безпощадната инфлация, поскъпването на енергоизточниците и трудността на доставките.
Все пак модерният фарминг не може без новите технологии. Трендът предопределя нахлуването им и в този сектор - неудържимо и бързо. Ножиците станаха електрически, после пневматични, а сега и електронни. Ползвателите са единодушни: производителността с такива инструменти се качва пет-шест пъти. Сега все още има затруднения от финансов характер за ползването на
дигитални инструменти
и иновативни машини за резитба в градини и лозя. Този проблем за следващия период може да отпадне, тъй като субсидии и помощи се насочват към овощарството и лозарството. Иначе казано, започва да се набира ресурс, за което и производителите се борят и притискат институциите. Т.е. ще бъде правилно да се вложат средства (преди да се обезценят) за нови технологии за зимно-пролетния резитбен сезон, което пък да гарантира нужната рентабилност.
Освен за ножици е добре да се мисли за по-продуктивни инструменти и оборудване. И на SIMA 22 се прояви тази тенденция. Там беше обособен специален център за осъвременяване и дигитализиране на дейностите в овощарството и лозарството. Такова отношение към проблема ще бъде демонстрирано и на предстоящия (от 1-ви декември т.г.) специализиран панаир VINITECH Cifel в Бордо, Франция за лозарски съоръжения, машини и техника за производство на вино.
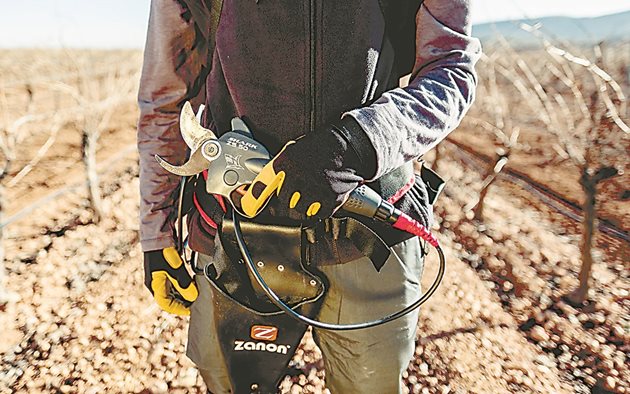
Преди около година писахме за употребата на най-модерни профи лозарски ножици, както и за електронни и пневматични автономни моторни резачки, предложени на пазара от производители, като италинския бранд ZANON, фирмата ORIZZONTI, марката Еdward и др. В овощарството и лозарството вече се използват и машини за подрязване като тези на SPEDO, VBC, COUP, LANDINI и др.
На дигиталното земеделие прилягат нови подходи. Както твърдят с основание специалисти, роботите за подрязване са били в списъка с намерения на овощари и лозари почти толкова дълго, колкото автоматизираната жътва. Но приложението на
електронни технологии в сектора
е сложен проблем поради алгоритмите за анализиране на дървесни системи и вземане на решения за подрязване.
Американската корпорация Vision Robotics (VRC) от години разработва роботизирани системи с широк спектър от приложения, включващи машинно зрение и прецизен контрол на задвижването. За ускорено прилагане на робоподхода съществен принос има и навлязлото в практиката опростяване на короните на дърветата и формиране на лозовите масиви. Базираните на робозрението алгоритми позволяват на агроботите да създават автономни триизмерни карти на терена и модели за работа. Те позволяват интелигентно и точно да се изпълняват работните задачи в насажденията, конкретно за резитбите. Заедно с това все по-често се използват съпътстващи камери и сензори за възприемане и оценка на околната среда.
VRC разработи и патентова технология за създаване на интелигентни мобилни роботи от следващо поколение, способни да взаимодействат с променящия се свят. Софтуерът и поддържащите системи на VRC позволяват да се анализират базата данни и да се работи автономно и надеждно в сложни условия. Оборудването с лекота се свързва с текущото поколение високопроизводителни, евтини микропроцесори, камери и други основни компоненти. Такъв дигитален подход прави
базираните на електронно зрение
роботи достъпни, мобилни и практични умни машини, използващи най-модерни и точни системи за картографиране, локализиране и навигация. Всяко подобно приложение е проектирано и създадено за уникалната среда на конкретната локация. Технологията е интегрирала добре познати алгоритми с най-нови разработки от изследователски лаборатории от цял свят и позволява ефективното им внедряване.
В портфолиото на Vision robotics corporation в последно време е включен като позиция и интелигентен автономен лозов агробот, който до броени месеци ще излезе в серийно производство. Той подрязва двустранно кордонни лози с качеството на ръчен труд. Резитбеният робот моделира лозата преди да направи първия отрез. Този холистичен подход позволява на оператора да прилага нужните за конкретната резитба правила и да гарантира ефективна и качествена работа.
В практиката на развитите овощарски държави вече се тестват и роботи за подрязване на овошки. Такъв е проектът UFO за резитби в черешова градина. Първият успешен опит за прилагане на технологията се проведе през март т.г. в изследователска овощна градина край Вашингтон от агробот, конструиран и обучен от участниците в UFO системата, които
са разработили правила
за роборезитба, съотвестващи на опростената структура на короните на дърветата. Т.е., как в короната да се подходи към клоните с режещ инструмент и как чрез системите за зрение, като се броят пъпките, да се изреже само ненужното. Камерите на роботизираната ръка сканират дървото и клоните, търсейки и набелязвайки тези, които да бъдат отрязани. Ръката се придвижва напред, като държи ножицата отворена, докато нейната зрителна система определя най-добрия път към целта. Тя бавно напредва, за да вкара клона в ножицата. След като сензорът в ножицата регистрира, че клонът е в позиция, тя щраква и го реже.
Камерите имат
зрително поле от 0,6 квадратни метра,
но в системата за UFO този тесен процеп е достатъчен. За да вземе решение, зрителната система трябва първо да различи лидера, който е отпред, от клоните в редовете отзад. Докато камерата сканира, алгоритъмът прави разлика между преден и заден план по начина, по който се движат пикселите. След това изображението се сегментира, за да се определят ключовите характеристики като: водач, тел на пергола и странични части.
Докато роботът сканира нагоре и надолу, по короната се оптимизират изчисленията, които трябва да формират скоростта на агробота, като се локализират клоните за подрязване. Fresh Fruit Robotics, израелска компания, разработваща робот за прибиране на ябълки, има планове да използва модулност - да сменя роборъцете за бране с такива за подрязване, за да постигне многофункционалност на машината и да я направи по-ефиксна и рентабилна.
На базата на подобни разработки и проекти се въвежда и GRAPE - наземен робот за наблюдение, обработки и защита на лозя. Този проект е получил финансиране от Седмата рамкова програма на Европейския съюз за научни изследвания, технологично развитие и демонстрации. Възприемането на такава иновативна концепция в отглеждането на лозя води до
автоматизиране на много задачи
вариращи от резитба на зелено до прореждане на гроздове. Проектът GRAPE е експеримент на Европейския координационен център за развитие на роботиката (Echord) на Европейската комисия. Има за цел да създаде благоприятни условия, които да позволят на компаниите за селскостопански услуги и доставчиците на оборудване да разработват лозарски роботи. Идеята е интелигетните машини да увеличат ефективността на инвестициите и да намалят производствените разходи по отношение на традиционните практики. По-специално, проектът е насочен към пазара на инструменти за биологичен контрол.
Инженерите чрез разработване на такива инструменти изпълняват целта за автономно наблюдение върху различни по площ лозови масиви. В добавка: постига се и намаляване на негативното въздействие върху околната среда по отношение на традиционната употреба на пестициди. Системата може да навигира през различни типове терени в лозята, да оценява реколтата и да наблюдава здравето на лозовите насаждения.
Локализацията се основава на хибридизацията на GNSР (Global Navigation Satellite Positioning) и локални сензори. Роботът е оборудван с лазерни скенери, които са свързани във времето и пространството, за да генерират триизмерна реконструкция на растенията. Това служи както за наблюдение на растежа, така и за планиране на манипулационни задачи.




















Коментари